Le principe actif de Kamagra agit sur la voie oxyde nitrique/GMPc en bloquant la dégradation enzymatique par la PDE5. Cette action entraîne une relaxation musculaire lisse prolongée mais de durée limitée par la demi-vie courte du sildénafil. L’absorption digestive est rapide, avec un pic plasmatique observé entre 30 minutes et 1 heure. Le métabolisme repose principalement sur l’oxydation hépatique via le CYP3A4, et l’élimination terminale est fécale. Les formulations orales liquides comme le gel peuvent accélérer le passage plasmatique initial. Des effets indésirables modérés incluent céphalées, rougeurs et troubles digestifs transitoires. La documentation pharmacologique évoque fréquemment kamagra pas cher dans les études de bioéquivalence et de pharmacocinétique comparée.
Tip01-05.pdf, page 1-5 @ normalize ( 06-07v5 )
IIT Innovazione
trolli aggiuntivi, difficili da realizzare negli
umanoidi azionati da articolazioni rigide. Strutture
zata in lega di titanio, acciaio inossidabile,
per l’ingegneria flessibile
alluminio e ricoperta da un esoscheletro pla-
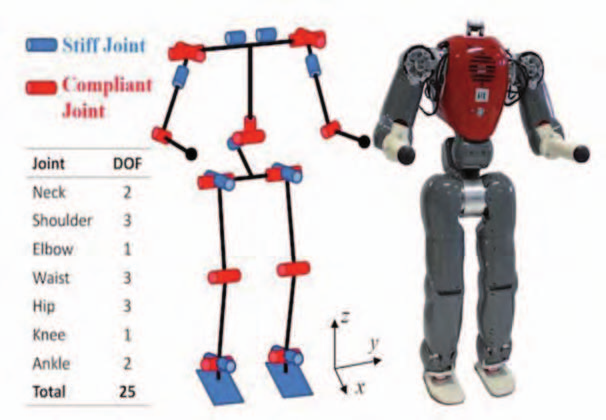
stico ABS. L’immagine mostra la posizione e
tissutale
la struttura degli attuatori elastici su fianchi,
L a maggior parte dei robot umanoidi ginocchia, caviglie, spalle e gomiti.
Nello sviluppo dell’umanoide adattabile,
il gruppo di IIT ha anche messo a punto un
N egli ultimi 10 anni, si è assistito
abbastanza rigide e questo è un problema nel
metodo per determinare l’elasticità articolare
di biomateriali diretti alla costruzione di
caso dovessero interagire con le persone. Le
braccia e gambe non flessibili, infatti, potreb-
bero provocare accidentalmente lesioni.
quadro di riferimento per altri ricercatori.
Ultimamente c’è stato un crescente inte-
Alcuni dei robot precedenti per esplorare
resse per lo sviluppo di giunti robotici a rigi-
hanno costruito un robot completo con que-
One (2007), robot di servizio destinati ad
assistere gli anziani. Per ragioni di sicurezza,
verso diverse tecniche, tra cui la stereoli-
progettato e realizzato dall’IIT, si avvicina a
in assenza di braccia adattabili, utilizzano
tografia, che permette di realizzare ogget-
questo obiettivo. Modellato su un bambino
di quattro anni, COMAN è alto 94,5 centi-
sono però piuttosto ingombranti. Più di
metri (dal piede al collo) e pesa 31,2 kg. È
recente, Meka Robotics ha prodotto un torso
tissutale spesso viene affrontato il proble-
dotato di 25 gradi di libertà, e combina rigi-
umanoide con braccia adattabili. Roboray di
ma della specificità dell’architettura degli
scaffolds in relazione al tessuto da sosti-
I giunti “adattabili” dipendono da attua-
tori elastici, progettati in modo personalizza-
necessari alla loro realizzazione resta in
to e applicati alla flessione/estensione delle
braccia e delle gambe. Sono piccoli e modu-
lari, il che li rende ideali per i robot con molti
Nikos G. Tsagarakis, Stephen Morfey, Gusta-
gradi di libertà come quelli umanoidi. I ricer-
vo Medrano Cerda, Zhibin Li e Darwin G.
catori hanno costruito anche sensori di cop-
Caldwell, è stato tra i primi a costruire un
Nanofisica dell’IIT, si è riproposto di
pia personalizzati per ciascuno dei giunti ela-
umanoide adattabile, con braccia e gambe.
stici. Gli attuatori elastici aggiungono una
Inoltre, oggi il robot è senza testa, ma si prov-
vederà al più presto, insieme a un paio di
nare assorbe naturalmente le forze di reazio-
mani che i ricercatori dicono di avere già
ne di ogni passo, senza l’applicazione di con-
messo a punto. ■
“Journal of the Royal Society Interface”, e
Implants, pubblicato su “BioPhotonics”,
tempi adatti a una produzione di massa.
innovazione, è stato possibile realizzare
uno scaffold poroso, costituito da un bio-
Fumarate) che rispetta sia la specificità di
forma e dimensioni, sia la biocompatibili-
tà, necessarie all’adesione e alla prolifera-
zione di cellule umane. ■ MIT TECHNOLOGY REVIEW
National Drug Code (NDC) Billing Reference (for Nevada Medicaid and Nevada Check Up Claims) Fee For Service Billing Requirement Effective January 1, 2008 The Deficit Reduction Act (DRA) of 2005 requires State Medicaid programs to collect rebates for physician/outpatient-facility administered drugs by January 1, 2008. To facilitate this, beginning January 1, 2008, Medicaid will requi
Greater Manchester, East Cheshire & High Peak Form C Neonatal Network Transport Service Antenatal Transfers Transfer Ref No: Indication for transfer (please circle): Maternal: Threatened or actual prem labour / PET / Maternal medical condition / other (specify) Foetal: specify EDD: Gestation (weeks): Condition at Referral Was patient contracting/ in lab
 IIT Innovazione
IIT Innovazione